Das GPS - Global Positioning System - ist ein auf 31 NAVSTAR Satelliten basierendes System, das vom US-Verteidigungsministerium entwickelt wurde und betrieben wird. Die offizielle Bezeichnung ist „Navigational Satellite Timing and Ranging – Global Positioning System“ (NAVSTAR GPS). NAVSTAR wird manchmal auch als Abkürzung für „Navigation System using Timing and Ranging“ genutzt. GPS wurde am 17. Juli 1995 offiziell in Betrieb genommen.
GPS funktioniert seit 1995 auch für die zivile Nutzung: bei allen Wetterbedingungen, überall auf der Welt und 24 Stunden rund um die Uhr. Seit dem Jahr 2000 ist die Selected Availability (künstliche Signalverschlechterung) deaktiviert und GPS kann seitdem zur exakten Messung von Fahrzeugbewegungen genutzt werden.
Triangulation als Basis:
(nicht maßstabsgetreue Animation, Quelle Wikipedia / GPS-Navstar)
Jeder der NAVSTAR Satelliten hat eine Atomuhr an Bord und wenn man von mindestens drei Satelliten GPS Signale empfängt, kann ein GPS-Empfänger die Distanzen zwischen der eigenen Position und den Satelliten bestimmen. Durch Triangulation errechnet der klassische GPS-Empfänger nun seine Position.
Schon die PerformanceBox und DriftBox verfügen über eine Hochleistungs-GPS-Engine, die mit 10-Hz getaktet ist. Das heißt: Die Position wird minimal jede 1/10 s aktualisiert. So entstünde schon eine hohe Genauigkeit bei der Erfassung eines sich schnell bewegenden Objekts. Doch reicht die rohe Positionserfassung alle 1/10 s nicht aus, wirklich nötige Genauigkeiten zu erreichen.
Erhöhung der relativen Positionsgenauigkeit von CEP 3 m stationär auf CEP <1 m bei Bewegung. Methode: Berechnung durch den Doppler-Effekt.
Würde man nun die Geschwindigkeit eines Fahrzeugs alleine durch die rohe Positionsänderung berechnen, dann hätte man zuviel Rauschen im Signal.
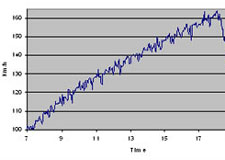
Bild: Geschwindigkeit über GPS-Positionsänderung ermittelt
Bei der Bewegung des Empfängers relativ zu den Satelliten entsteht eine Verschiebung der Signale (Änderung der Frequenz), der Dopplereffekt, und aus diesen minimalen Veränderungen errechnen die Racelogic-Systeme nun die Geschwindigkeit - und darauf basiert jede weitere Kalkulation.
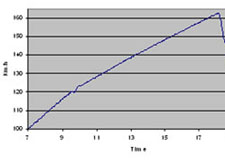
Bild: Geschwindigkeit über den GPS-Signal-Dopplereffekt berechnet
Die Bewegungsrichtung (Heading) des Empfängers wird ebenfalls ermittelt und kann als künstlicher Kompass oder zur Ausrichtung von elektronischen Karten dienen. Aus den Daten Geschwindigkeit und Heading leiten Racelogic Messsysteme dann alle weiteren Fahrdynamikdaten wie Längs- und Querbeschleunigung, Kurvenradius, Höhenprofil, relative Position auf der Strecke und Drehrate mathematisch ab. Kalmanfilter sorgen für eine zusätzliche Reduktion des Rauschens bei jedem Messvorgang - reduzieren die Responsivität aber kaum. Die Bewegungsdynamik wird nicht übermäßig geglättet. So entstehen die typisch "feinzackigen" Graphen für Speed und G-Forces - ein Qualitätsmerkmal für ein offenes und schnelles GPS-Datarecording. Für die Datenanalyse stehen in den Softwares individuelle Glättungsmöglichkeiten zur einfacheren Analyse zur Verfügung.
Fazit: die Messung mit der von Racelogic angewandten Technologie erzielt eine ausgezeichnete Genauigkeit bei der Berechnung von Fahrdynamikdaten. Die langjährige Erfahrung mit GPS-Daten aus dem Feld Auotomotive-Entwicklung (Systeme wie VBOX 3i bis 100 Hz Taktung und Inertialkorrektur) erlauben es Racelogic, auch mit unter 20 Hz getakteten Systemen die realistische Fahrdynamik sehr akkurat zu erfassen.
Allgemein:
GPS-Empfänger mit Eignung für Motorsporteinsätze finden sich aus Kostengründen auch nur in echten Messtechniksystemen. GPS-Empfänger von Mobiltelefonen, Navigationssystemen oder Trackingsystemen (z.B. LKW/Logistik-Tracking) sind grundsätzlich nicht in der Lage, Rennfahrzeuge oder allgemein sich "dynamisch" bewegende Objekte realistisch in der Bewegung aufzuzeichnen. Sie sind weder responsiv genug, noch haben sie eine ausreichende Abtastrate für eine realistische Geschwindigkeits- und Richtungsangabe, zudem glätten sie die Daten meist sehr stark.